|
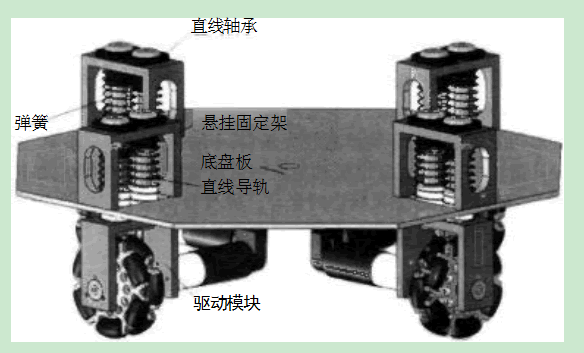
ÖCŲ„╚╦Ą─Ąū▒PįOėŗų„ę¬┐╝æ]Ąū▒P╚½Ž“▌åĄ─▓╝ŠųĪóĄū▒P┤¾ąĪ║═Ąū▒PæęÆņĄ─å¢ Ņ}ĪŻęŲäėÖCŲ„╚╦▓╔ė├╦─╚½Ž“▌å▓╝ŠųĄ─ĘĮ╩ĮŻ¼▌åų«Ū░Ą─ŖAĮŪ×ķ 90ĪŃĪŻĮėŽ┬üĒę¬┤_Č©Ąū▒PĄ─┤¾ąĪŻ¼ę“×ķĄū▒P┤¾ąĪ╩Ūė░ĒæÖCŲ„╚╦ĘĆČ©ąįĄ─┴Ēę╗ųžę¬ ę“╦žĪŻ╚ń╣¹ÖCŲ„╚╦Ą─Ąū▒P╠½ąĪŻ¼Č°ÖCŲ„╚╦Ą─ųžą─ėų▌^Ė▀Ż¼─Ū├┤į┌ÖCŲ„╚╦╝ė£p╦┘Ą─▀^ │╠ųą║▄╚▌ęūāAĄ╣ĪŻ┤_Č©Ąū▒P┤¾ąĪĄ─╗∙▒Šę¬Ū¾╩Ū▒ŻūCÖCŲ„╚╦į┌╝ė£p╦┘Ą─▀^│╠ųą▓╗Ģ■ āAĄ╣ĪŻ
ė╔ė┌ÖCŲ„╚╦▓╔ė├┴╦╦─éĆ╚½Ž“▌åĄ─Ąū▒PŻ¼į┌ŲĮ├µ╔Ž║▄ļy▒ŻūC╦─éĆ³c═¼Ģrų°ĄžĪŻ ╚ń╣¹╦─éĆ▌åūė▓╗─▄═¼Ģrų°Ąž╗“š▀Įėė|▓╗║├Ą─įÆŻ¼Š═║▄╚▌ęū│÷¼F▌åūė┐š▐D╗“┤“╗¼Ą─ ¼FŽ¾Ż¼ė░ĒæÖCŲ„╚╦Ą─▀\äėĪŻę“┤╦Ż¼ī”ė┌╦─▌åÖCŲ„╚╦Ż¼æęÆņįOėŗ╩Ū▓╗┐╔╗“╚▒Ą─ę╗▓┐ĘųĪŻ į┌╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦Ą─įOėŗųąŻ¼ų„ę¬┐╝æ]ÖCŲ„╚╦į┌╩ęā╚ęŲäėĢrę¬▒ŻūC╦─▌å═¼Ģrų° ĄžŻ¼Č°ŪęŻ¼«ö╠Äį┌▓╗║▄ŲĮ╠╣Ą─Ąž├µĢrŻ¼▌åūėę▓─▄║▄║├Ąž┼cĄž├µĮėė|ĪŻį┌▀@ĘNę¬Ū¾Ž┬Ż¼ ╚ń╣¹▓╔ė├ŅÉ╦ŲŲ¹▄ć╔ŽĄ─▄øæęÆņĄ─įÆŻ¼į┌ÖCŲ„╚╦▀\ąąĢrŠ═║▄╚▌ęū│÷¼FŪ░║¾ū¾ėę╗╬äė Ą─¼FŽ¾ĪŻę“┤╦Ż¼į┌ŲĮĒś▀\ąąĢrŻ¼ÖCŲ„╚╦Ą─Ąū▒P┼cæęÆņūŅ║├─▄▒Ż│ųė▓Įėė|ĪŻį┌æęÆņĮY śŗ╔ŽŻ¼×ķĘĮ▒ŃŲęŖ.▓╔ė├┴╦ų▒╔Žų▒Ž┬Ą─æęÆņĘĮ╩ĮŻ¼╚ńłD2-3-9╦∙╩ŠĪŻ
æęÆņįOėŗūŅųžę¬Ą─╩ŪÅŚ╗╔Ą─▀xō±Ż¼║å╗»─Żą═╚ń
łD2 - 3 - 10╦∙╩ŠĪŻ
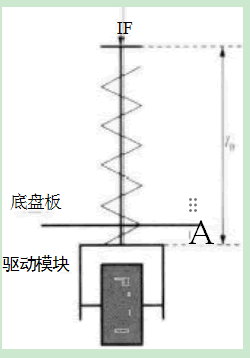
į┌╦─éĆ▌åūėŲĮŠ∙ų°ĄžĄ─ŪķørŽ┬Ż¼æ¬«ö▒ŻūCĄū▒P░Õ┼c“īäė─ŻēKÖC╝▄Įėė|ĪŻ┤╦Ģr
F=mg/8=68N (2-3-1)
įOėŗę¬Ū¾Ī„l=0.02m.
ę“ ┤╦ Ż¼
k=F/Ī„l=3437 N/m (2-3-2)
ÅŚ╗╔įŁķLįOėŗ×ķ14cm ĪŻ ▓ķć°ś╦▀xĄ├ÅŚ╗╔Ą─═ŌÅĮ×ķ20 mm,ĮzÅĮ×ķ2mm,┬▌ŠÓ×ķ5mm Ą─║Ž▀m ę¬Ū¾ ĪŻ
ĮYśŗ╔ŽŻ¼×ķĘĆ═ūŲęŖŻ¼├┐éĆ▌å╔Ž▓╔ė├ā╔éĆÅŚ╗╔Ż¼ ÅŚ╗╔Ą─ ę╗Č╦Ēöį┌æęÆņū∙Ą─Ž┬é╚Ż¼┴Ē ę╗Č╦Ēöį┌“īäė─Ż ēK╔ŽŻ¼▀@śėŻ¼╚ń╣¹─│éĆ▌åūė╔ŽĄ─ē║┴”£pąĪ╗“š▀æę┐š
Ą─įÆŻ¼ÅŚ╗╔╔ņķLŻ¼╩╣Ą├įō▌åūė─▄│õĘųų°ĄžĪŻĄū▒P░Õį┌äéČ╚ę¬Ū¾įS┐╔Ą─ŪķørŽ┬Ż¼▀xė├ ┴╦5cm ║±Ą─6061õX║ŽĮ░Õ▓─ĪŻ
|
